I. Derivation of Wave Equation
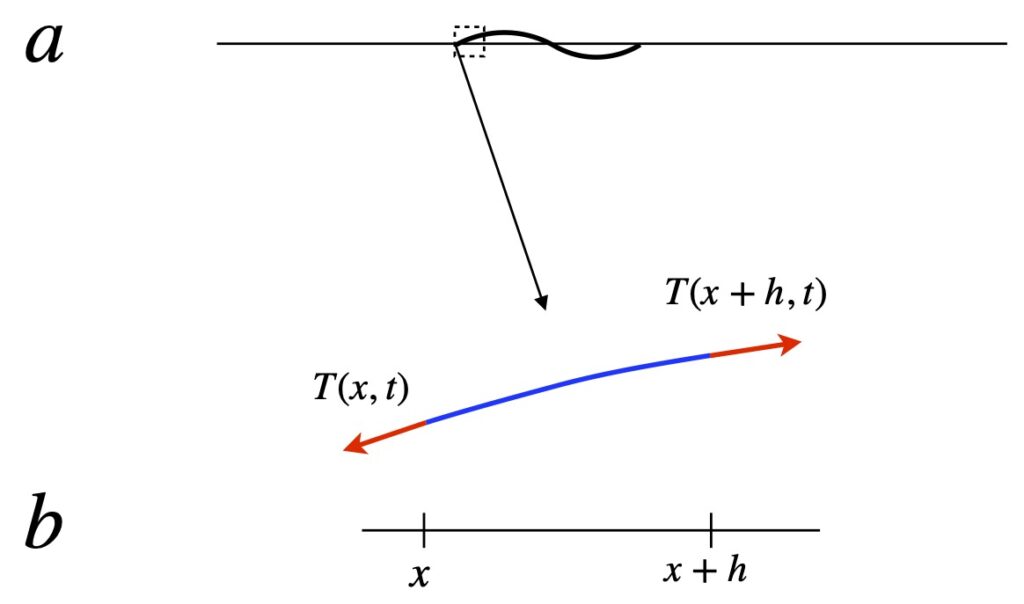
We wish to derive the wave equation. Consider figure 1 above. Figure 1a shows a string fixed at both ends. We tweak the string at its lefthand margin and cause a wave to propagate to the right along the string. Figure 1b is a blow up of the tiny string segment shown in the dotted square in figure 1a. We make 4 assumptions for our derivation:
- Motion of the string is only vertical
- The string offers no resistance to bending (If it did, there would be horizontal force components and the only horizontal force components we want to consider are those caused by tension in the string)
- The height of the string’s vibration is small
- The density in the tiny string segment we’re considering in figure 1b is uniform
We’ll start our derivation by with Newton’s second law of motion:
![\[F=ma \quad \text{eq 1.1}\]](https://www.samartigliere.com/wp-content/ql-cache/quicklatex.com-ea92f582a4ec1638c16f51c44cdc86cd_l3.png "Rendered by QuickLaTeX.com")
Let’s look at acceleration,  , first. The acceleration with which we’re concerned is in the up-down direction, the only direction in which the string moves. We’ll designate that direction
, first. The acceleration with which we’re concerned is in the up-down direction, the only direction in which the string moves. We’ll designate that direction  . We know from classical mechanics that acceleration is the second derivative of displacement. The acceleration, in this case, is:
. We know from classical mechanics that acceleration is the second derivative of displacement. The acceleration, in this case, is:
![\[ a=\frac{\partial^2 u}{\partial t^2} \quad \text{eq 1.2}\]](https://www.samartigliere.com/wp-content/ql-cache/quicklatex.com-35ed493eb06eebb1162532d2630fab9a_l3.png "Rendered by QuickLaTeX.com")
where  is the second partial derivative of the up-down displacement, .
is the second partial derivative of the up-down displacement, .
Next, let’s consider the mass,  of the tiny string segment from x to x + h. This is given by the mass density (mass per unit length),
of the tiny string segment from x to x + h. This is given by the mass density (mass per unit length),  , of the string segment times the length of that segment:
, of the string segment times the length of that segment:  . We’ll assume that the density over such a small string segment is uniform. Therefore, we can use the density at any point along the segment to find the mass. Let’s choose
. We’ll assume that the density over such a small string segment is uniform. Therefore, we can use the density at any point along the segment to find the mass. Let’s choose  . For the length, since the amplitude of the string’s vibration is small, it is relatively flat. Therefore,
. For the length, since the amplitude of the string’s vibration is small, it is relatively flat. Therefore,  . So:
. So:
![\[ m=\rho(x)h \quad \text{eq 1.3}\]](https://www.samartigliere.com/wp-content/ql-cache/quicklatex.com-ceea054ef4f9eaf7ae1231a786c50b35_l3.png "Rendered by QuickLaTeX.com")
Now let’s tackle the forces. The only forces that we’ll consider in this article are the forces caused by tension on the string. The tension in the string is tangent to the string. It has 2 components: one in the u-direction and another in the x-direction.
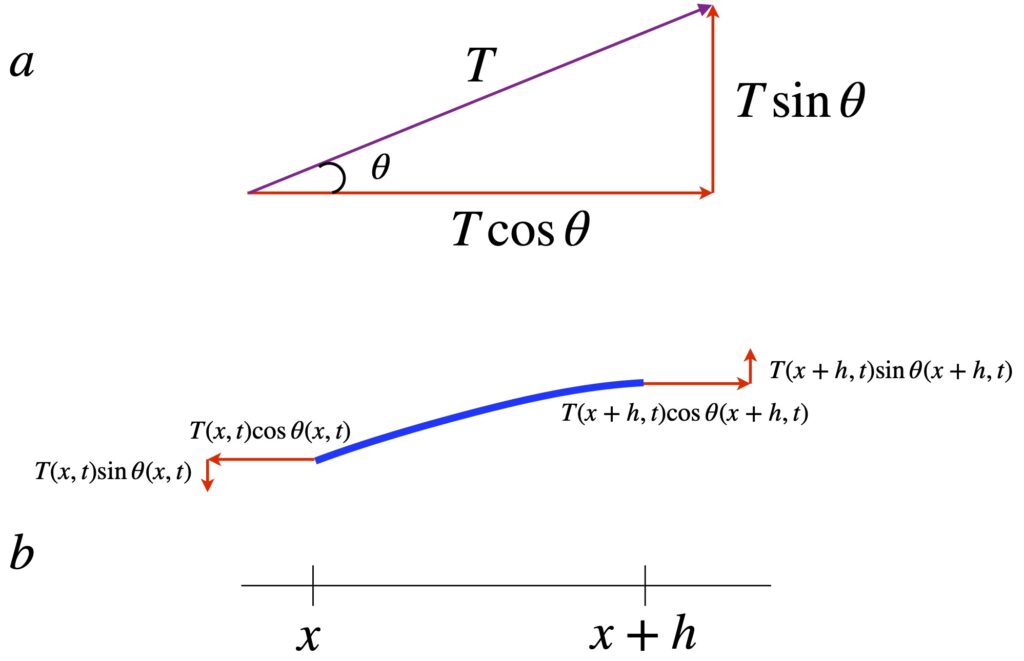
Figure 2a shows how, using trigonometry, that we can calculate the components of force caused by string tension in each direction. Figure 2b depicts the mathematical expressions for force components related to string tension.
Since there’s no horizontal motion of the string, that means that the x-direction of tension coming from  is equal and opposite to the x-direction tension at
is equal and opposite to the x-direction tension at  . Mathematically, as shown in the diagram:
. Mathematically, as shown in the diagram:
![\[ T(x,t)\cos\theta(x,t) = T(x+h,t)\cos\theta(x+h,t) \]](https://www.samartigliere.com/wp-content/ql-cache/quicklatex.com-8e88a626af05a63434c7f0e3849a2a60_l3.png "Rendered by QuickLaTeX.com")
So:
![\[T(x,t)\cos\theta(x,t) - T(x+h,t)\cos\theta(x+h,t)=0 \quad \text{eq 1.4}\]](https://www.samartigliere.com/wp-content/ql-cache/quicklatex.com-00181efcd539d4500181db657d2e10a5_l3.png "Rendered by QuickLaTeX.com")
The more important force to evaluate is that in the u-direction. The force in the upward direction due to is  . That at is
. That at is  . The net upward force is:
. The net upward force is:
![\[ T(x+h,t)\sin\theta(x+h,t)- T(x,t)\sin\theta(x,t) \quad \text{eq 1.5}\]](https://www.samartigliere.com/wp-content/ql-cache/quicklatex.com-1d9924c28acce5919d4f8a95a70dd682_l3.png "Rendered by QuickLaTeX.com")
Collecting terms, we get what’s shown in figure 3:
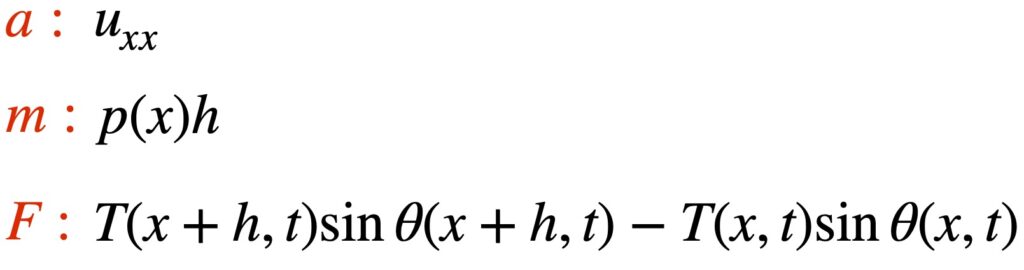
Plugging these values into eq (1.1), we get:
![\[ T(x+h,t)\sin\theta(x+h,t)- T(x,t)\sin\theta(x,t)=\rho(x)h\frac{\partial^2 u}{\partial t^2} \quad \text{eq 1.6}\]](https://www.samartigliere.com/wp-content/ql-cache/quicklatex.com-4a86f6282c28283f02fd19bd02a2595f_l3.png "Rendered by QuickLaTeX.com")
Next, divide both sides by  :
:
![\[\frac{ T(x+h,t)\sin\theta(x+h,t)- T(x,t)\sin\theta(x,t)}{h}=\rho(x)\frac{\partial^2 u}{\partial t^2}\quad \text{eq 1.7}\]](https://www.samartigliere.com/wp-content/ql-cache/quicklatex.com-8a81b0f1983c0bf5a7e554375bbc840a_l3.png "Rendered by QuickLaTeX.com")
Take the limit as  on both sides of the equation. This makes the left side of the equation equal to the partial derivative of with respect to
on both sides of the equation. This makes the left side of the equation equal to the partial derivative of with respect to  :
:
![\[\frac{\partial T(x,t)\sin\theta(x,t)}{\partial x}=\lim_{h\rightarrow 0}\frac{ T(x+h,t)\sin\theta(x+h,t)- T(x,t)\sin\theta(x,t)}{h}=\rho(x)\frac{\partial^2 u}{\partial t^2} \quad \text{eq 1.8}\]](https://www.samartigliere.com/wp-content/ql-cache/quicklatex.com-a3cc9cf841d14d2f89fcd4b6bcadbbae_l3.png "Rendered by QuickLaTeX.com")
We’d like to get rid of the  term and get everything in the equation in terms of . To do this, we note (as depicted in figure 4) that the slope of our string is given by a line to our string at any given point. The slope of this tangent line is
term and get everything in the equation in terms of . To do this, we note (as depicted in figure 4) that the slope of our string is given by a line to our string at any given point. The slope of this tangent line is  . But we said at the beginning of this discussion that the tension in the string is always tangent to the string. And as seen in figure 2a, that tension has components
. But we said at the beginning of this discussion that the tension in the string is always tangent to the string. And as seen in figure 2a, that tension has components  and
and  . Therefore:
. Therefore:
![\[ \frac{du}{dx}=\tan\theta=\frac{\sin\theta}{\cos\theta} \quad \text{eq 1.9}\]](https://www.samartigliere.com/wp-content/ql-cache/quicklatex.com-fd8dc375a77448288e5434705e708ebd_l3.png "Rendered by QuickLaTeX.com")
But one of our assumptions was that the magnitude of the string oscillations was small meaning that  . That, in turn, means that
. That, in turn, means that  which means that:
which means that:
![\[ \frac{du}{dx}=\frac{\sin\theta}{\cos\theta}\approx \frac{\sin\theta}{1} \approx \sin\theta \quad \text{eq 1.10}\]](https://www.samartigliere.com/wp-content/ql-cache/quicklatex.com-a44619edc075dea816504327343030d5_l3.png "Rendered by QuickLaTeX.com")
So we can replace  with
with  to get
to get
![\[ \frac{\partial}{\partial x}\left(T(x,t)\frac{du}{dx} \right)= \rho(x)\frac{\partial^2 u}{\partial t^2} \quad \text{eq 1.11}\]](https://www.samartigliere.com/wp-content/ql-cache/quicklatex.com-ccd5fa3711a1259fd90bd2aef8d79d0c_l3.png "Rendered by QuickLaTeX.com")
So:
![\[ T(x,t)\frac{\partial^2 u}{\partial x^2}= \rho(x)\frac{\partial^2 u}{\partial t^2} \quad \text{eq 1.12}\]](https://www.samartigliere.com/wp-content/ql-cache/quicklatex.com-6e8d87cf7679aea7bd598dd589ee688b_l3.png "Rendered by QuickLaTeX.com")
If we make 2 further assumptions:
- is constant (i.e.,
 (perfect elasticity))
(perfect elasticity)) - is constant i.e., (
 )
)
Then  and can be pulled out of the derivatives. We get:
and can be pulled out of the derivatives. We get:
![\[ \frac{\partial^2 u}{\partial t^2} = \frac{T}{\rho}\frac{\partial^2 u}{\partial x^2} \quad \text{eq 1.13}\]](https://www.samartigliere.com/wp-content/ql-cache/quicklatex.com-6bb1756331bd63e9bed3c1373ab354a7_l3.png "Rendered by QuickLaTeX.com")
Eq 1.13 is often expressed as:
![\[ \frac{\partial^2 u}{\partial t^2} = c^2\frac{\partial^2 u}{\partial x^2} \quad \text{eq 1.14}\]](https://www.samartigliere.com/wp-content/ql-cache/quicklatex.com-70ef4b6d89619a1a74eabfeaa48fc605_l3.png "Rendered by QuickLaTeX.com")
To see why this is the case, let’s examine the units of  . We have:
. We have:

where
 is mass
is mass
 is length
is length
is time
 is velocity (speed, actually) at which the wave propagates
is velocity (speed, actually) at which the wave propagates
Thus, has units of speed squared. For electromagnetic waves, that speed is c, the speed of light.
II. Solutions to the Wave Equation
II.1 Transport Equation Method
II.1.1 Transport Equation
Consider a wave moving to the right with constant velocity, as depicted in figure 2.1.1.
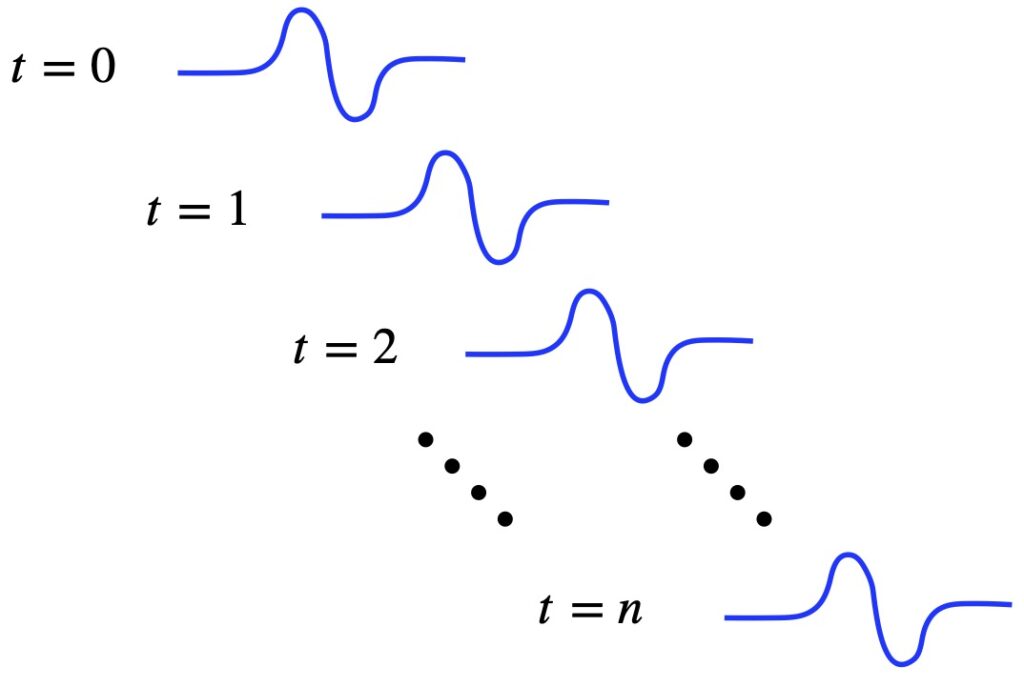
What kind of partial differential equation (pde) would this be a solution to? One like the transport equation, the simplest pde to exhibit such a solution:
![\[ u_t + cu_x = 0 \quad \text{eq 2.1.1.1}\]](https://www.samartigliere.com/wp-content/ql-cache/quicklatex.com-1693b9e7b6e99673185f47d77f44675e_l3.png "Rendered by QuickLaTeX.com")
where
, and  are directions in a 3D space
are directions in a 3D space


 is a constant
is a constant
Let’s look at this from a slightly different perspective (figure 2.1.2):
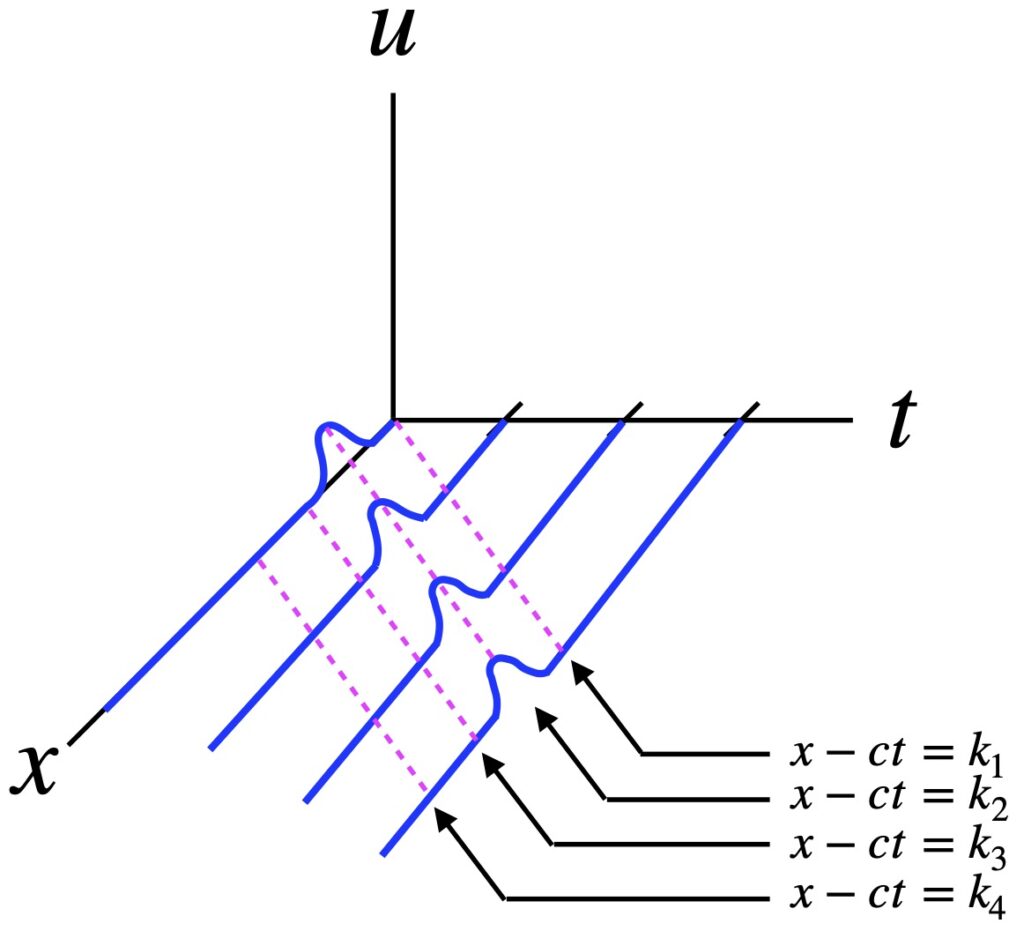
In figure 2.1.2, the blue waves are moving in the x-direction with constant speed, . Note that the wave amplitude, , is constant along the parallel magenta dotted lines which all have the equation  . Such parallel lines are called characteristic lines.
. Such parallel lines are called characteristic lines.
We can think of the blue waves as forming a surface. Recall the concept of the directional derivative from multivariable calculus. Basically, we define a tangent plane to the surface and take the derivative in a particular direction. Mathematically, it’s defined as the inner product of the gradient of a scalar field:
![\[ \vec{W} \cdot \nabla f \quad \text{eq 2.1.1.2}\]](https://www.samartigliere.com/wp-content/ql-cache/quicklatex.com-9ed78b93d373848feb8914ba598f4819_l3.png "Rendered by QuickLaTeX.com")
where
 is a vector that points in the direction of the directional derivative
is a vector that points in the direction of the directional derivative
 is a scalar field
is a scalar field
 is the gradient of the scalar field
is the gradient of the scalar field
As it applies to our case here, we’re taking the directional derivative in the direction of the parallel lines given by  . And since we said that does not change along those lines, then the directional derivative is 0.
. And since we said that does not change along those lines, then the directional derivative is 0.
The vector, , in our case, is given by  since we’re moving units in the x-direction in 1 unit of time. The gradient of our scalar field is given by
since we’re moving units in the x-direction in 1 unit of time. The gradient of our scalar field is given by  . Thus, by the definition of the directional derivative, we have:
. Thus, by the definition of the directional derivative, we have:

which, of course, is the transport equation.
We could also write as a function of with the x-coordinate being  which implies that
which implies that  . We know that doesn’t change along the characteristic line so the derivative with respect to time should be zero:
. We know that doesn’t change along the characteristic line so the derivative with respect to time should be zero:
![\[ \frac{d}{dt} u(ct + k, t) = 0 \quad \text{eq 2.1.1.4}\]](https://www.samartigliere.com/wp-content/ql-cache/quicklatex.com-97c5fac967c38759f1bb7aabc0b7a088_l3.png "Rendered by QuickLaTeX.com")
We use the chain rule to take this derivative:

Again, we end up with the transport equation.
Hopefully, that provides some intuition about what the transport equation is. Now we turn our attention to its solution.
II.1.2 Transport Equation Solution
To solve the transport equation, consider the scenario outlined in figure 2.2.1.
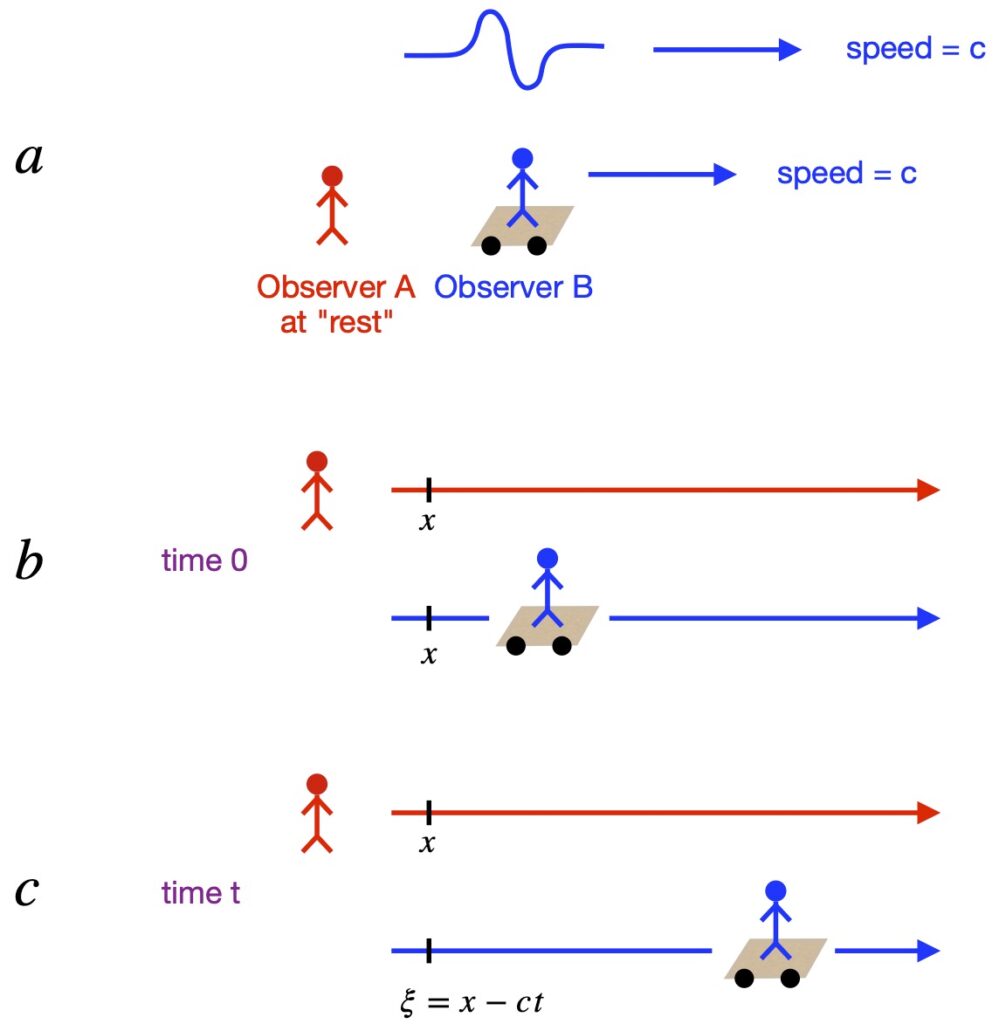
Figure 2.2.1a shows 2 frames of reference: 1) that of Observer A (in red) on the ground and 2) Observer B (in blue) on a cart moving along with a wave, the cart and wave both moving to the right at speed c.
In figure 2.2.1b, taken at time 0, both observers agree on the position of a point, x.
On the other hand, in figure 2.2.1c, taken at time t, Observer A still sees point x at x. However, Observer B has moved  units to the right. Thus, he now sees point x as being at
units to the right. Thus, he now sees point x as being at  .
.
Observer A sees a moving wave. The pde that describes what he sees is the transport equation:
![\[ u_t + cu_x = 0 \quad \text{eq 2.1.1}\]](https://www.samartigliere.com/wp-content/ql-cache/quicklatex.com-a084b7f0c21175cf7ec272e7489ae165_l3.png "Rendered by QuickLaTeX.com")
The question is, What pde describes what Observer B sees?
We know that we’re looking at the same wave so:
![\[ u(x,t) = v(\xi, t) \quad \text{eq 2.1.2.1}\]](https://www.samartigliere.com/wp-content/ql-cache/quicklatex.com-b48bb0df792745b87e1f357a4aec9197_l3.png "Rendered by QuickLaTeX.com")
That is, the pde that describes Observer A’s frame of reference,  , equals the pde that describes Observer B’s frame of reference (we’ll call it
, equals the pde that describes Observer B’s frame of reference (we’ll call it  ). We know that is the transport equation. To find , we need to translate the terms in the transport equation into the Observer B’s frame of reference. We have:
). We know that is the transport equation. To find , we need to translate the terms in the transport equation into the Observer B’s frame of reference. We have:
![\[ u_t = \frac{\partial v}{\partial \xi} \frac{\partial \xi}{\partial t} + \frac{\partial v}{\partial t} \frac{\partial t}{\partial t} \quad \text{eq 2.1.2.2}\]](https://www.samartigliere.com/wp-content/ql-cache/quicklatex.com-d7eb9e3bb2436da53663ddb3fbfd5aca_l3.png "Rendered by QuickLaTeX.com")
and
![\[ u_x = \frac{\partial v}{\partial \xi} \frac{\partial \xi}{\partial x} + \frac{\partial v}{\partial t} \frac{\partial t}{\partial x} \quad \text{eq 2.1.2.3}\]](https://www.samartigliere.com/wp-content/ql-cache/quicklatex.com-6c67f3f6ead5dfa06abe60022487c347_l3.png "Rendered by QuickLaTeX.com")
We know that:




Plugging these values into eq (), we get:
![\[ u_t = \frac{\partial v}{\partial \xi}(-c)+\frac{\partial v}{\partial t}(1)=-c\frac{\partial v}{\partial \xi}+\frac{\partial v}{\partial t} \quad \text{eq 2.1.2.4}\]](https://www.samartigliere.com/wp-content/ql-cache/quicklatex.com-52397fe76e187e77e8a162d76e3a053f_l3.png "Rendered by QuickLaTeX.com")
and
![\[ u_x = \frac{\partial v}{\partial \xi} (1) + \frac{\partial v}{\partial t} (0) = \frac{\partial v}{\partial \xi} \quad \text{eq 2.1.2.5}\]](https://www.samartigliere.com/wp-content/ql-cache/quicklatex.com-395157a2be73904d272a4efa157e00c8_l3.png "Rendered by QuickLaTeX.com")
Now we substitute these values into the transport equation which gives us:

 , the derivative of
, the derivative of  with respect to , equaling zero means that does not change with a change in which means that does not depend on which means that it must be solely a function of
with respect to , equaling zero means that does not change with a change in which means that does not depend on which means that it must be solely a function of  :
:
![\[ v=F(\xi) \quad \text{eq 2.1.2.7}\]](https://www.samartigliere.com/wp-content/ql-cache/quicklatex.com-6ba069f3d4561353a4ff5cd3c158d664_l3.png "Rendered by QuickLaTeX.com")
Let’s use this to find . We’ve seen that:
But that implies that:
![\[ u(x,t) = v(\xi, t) = F(\xi) = F(x-ct) \quad \text{eq 2.1.2.8}\]](https://www.samartigliere.com/wp-content/ql-cache/quicklatex.com-f4a4a55f649c624ef9c63b21e666aa79_l3.png "Rendered by QuickLaTeX.com")
And that’s the general solution to the transport equation.
II.1.3Wave Equation Solution Using Transport Equation
We want to solve the wave equation:
Assume that a function, , solves the wave equation. Let’s see what happens when we plug into the transport equation:
![\[ u_t + cu_x = w \quad \text{eq 2.1.3.1}\]](https://www.samartigliere.com/wp-content/ql-cache/quicklatex.com-fabddcfc0c928ff654ec42af77542359_l3.png "Rendered by QuickLaTeX.com")
I claim that if:
![\[ w_t - cw_x = 0 \quad \text{eq 2.1.3.2} \]](https://www.samartigliere.com/wp-content/ql-cache/quicklatex.com-2c673dfe947da083274a296122e638dc_l3.png "Rendered by QuickLaTeX.com")
i.e., if  solves the backward transport equation, the solves the wave equation. Here’s the proof.
solves the backward transport equation, the solves the wave equation. Here’s the proof.
Start by substituting the value of in terms of into eq 2.1.3.2:

The result of this calculation is, of course, the wave equation. So the only way that equations 2.1.3.1 and 2.1.3.2 can be true is if solves the wave equation.
Now, if we can find a solution to eq 2.1.3.2 and plug that result into eq 2.1.3.1, then that solution should also be a solution to the wave equation. For example, let  . That means that:
. That means that:
![\[ u_t + cu_x = w = 0\]](https://www.samartigliere.com/wp-content/ql-cache/quicklatex.com-8948bee2243768b72f77b32785847bad_l3.png "Rendered by QuickLaTeX.com")
This is the transport equation. We saw above that the solution to this equation is:
![\[ u(x,t) = p(x-ct) \quad \text{eq 2.1.3.3} \]](https://www.samartigliere.com/wp-content/ql-cache/quicklatex.com-ee25cb9fd959172e1fe3856e02e36b2e_l3.png "Rendered by QuickLaTeX.com")
That implies that  is also a solution to the wave equation.
is also a solution to the wave equation.
We can make the same argument for the reverse transport equation. Let:
![\[ u_t - cu_x = v \quad \text{eq 2.1.3.4}\]](https://www.samartigliere.com/wp-content/ql-cache/quicklatex.com-3837a9e702dd85ab7e09e18f4471811b_l3.png "Rendered by QuickLaTeX.com")
and
![\[ v_t + cv_x = 0 \quad \text{eq 2.1.3.5} \]](https://www.samartigliere.com/wp-content/ql-cache/quicklatex.com-2d0465696f05e44a4e0385be779f4dfa_l3.png "Rendered by QuickLaTeX.com")
We can show – using arguments similar to those we just used – that if these 2 equations are true, then is a solution to the wave equation. Then if we take  , then:
, then:
![\[ u_t - cu_x = 0 \quad \text{eq 2.1.3.6}\]](https://www.samartigliere.com/wp-content/ql-cache/quicklatex.com-2b8f9bcf5a71dd012dc9a3180845570d_l3.png "Rendered by QuickLaTeX.com")
By arguments similar to those used to solve the forward transport equation (except have the cart move to the left rather than right; see section II.1.2) we can solve the backward transport equation. Its solution is:
![\[ u(x,t) = q(x+ct) \quad \text{eq 2.1.3.7} \]](https://www.samartigliere.com/wp-content/ql-cache/quicklatex.com-be5eca403b783f8261fcc6bf82868fb0_l3.png "Rendered by QuickLaTeX.com")
Thus, eq 2.1.3.7 is also a solution to the wave equation.
Now the wave equation is a linear equation. Therefore, if  and
and  are both solutions to the wave equation, then
are both solutions to the wave equation, then
![\[u(x,t) = p(x+ct) + q(x+ct) \quad \text{eq 2.1.3.8} \]](https://www.samartigliere.com/wp-content/ql-cache/quicklatex.com-c7f8bd997c7a078ac3d581e17fcbd07c_l3.png "Rendered by QuickLaTeX.com")
is also a solution to the wave equation. The significance of this formula is that every solution to the wave equation has the form shown in eq 2.1.3.8. We haven’t proved this yet (we’ve just proved that eq 2.1.3.8 is a valid group of solutions to the wave equation). We’ll prove that eq 2.1.3.8 is the general solution to the wave equation next. To do this, I’ll begin with the proof laid out completely in diagrammatic form so the reader can “see the flow” in uninterrupted fashion, then I’ll offer some explanatory text thereafter to fill in the gaps.
Proof:
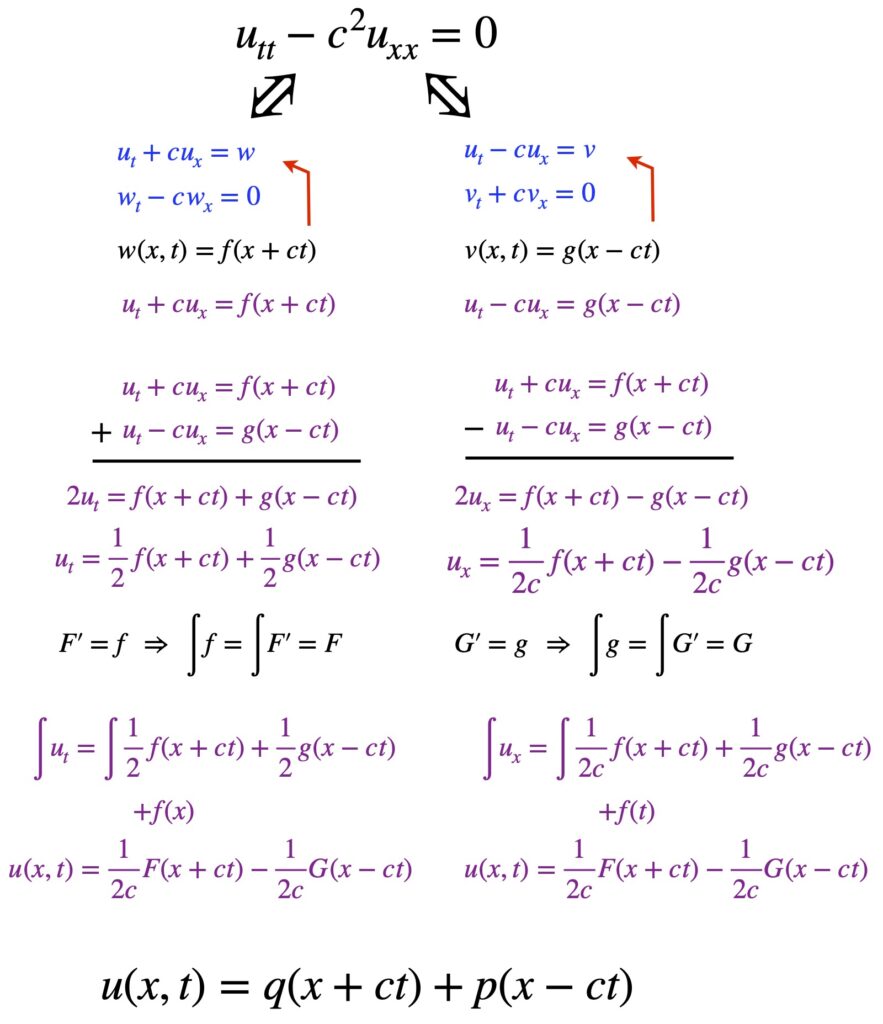
Here are some explanatory comments for figure 2.3.1.
We’ve shown that the wave equation and the 2 sets of transport equations in blue are equivalent. The solutions to the backward and forward transport equations are given in black. These results can be substituted to get the equations in purple:
![\[ u_t + cu_x = f(x + ct) \quad \text{eq 2.1.3.9} \]](https://www.samartigliere.com/wp-content/ql-cache/quicklatex.com-0ab9fc2dd7606246e3304ab7d2b0db3e_l3.png "Rendered by QuickLaTeX.com")
and
![\[ u_t - cu_x = g(x - ct) \quad \text{eq 2.1.3.10} \]](https://www.samartigliere.com/wp-content/ql-cache/quicklatex.com-73ae7b1c8321c4953ac51420a462f2d4_l3.png "Rendered by QuickLaTeX.com")
If we add these 2 equations, after some manipulation, we get:
![\[ u_t = \displaystyle \frac12 f(x + ct) + \frac12 g(x - ct) \quad \text{eq 2.1.3.11}\]](https://www.samartigliere.com/wp-content/ql-cache/quicklatex.com-80e97d787ff4f63ea4d3b7bc96d65889_l3.png "Rendered by QuickLaTeX.com")
and
![\[ u_x = \displaystyle \frac{1}{2c} f(x + ct) - \frac{1}{2c} g(x - ct) \quad \text{eq 2.1.3.12}\]](https://www.samartigliere.com/wp-content/ql-cache/quicklatex.com-53466b8c4b5d17814670b31f58a05493_l3.png "Rendered by QuickLaTeX.com")
From the fundamental theorem of calculus, we know that:
![\[ X^{\prime} = x\,\,\Rightarrow \,\,\int x = \int X^{\prime} = X \]](https://www.samartigliere.com/wp-content/ql-cache/quicklatex.com-e458678231ed26c8d240ef022fef4f38_l3.png "Rendered by QuickLaTeX.com")
We then integrate eq 2.1.3.11 and eq 2.1.3.12. That gives us, for eq 2.1.3.11:

And for eq 2.1.3.12:

Notice that the terms  are the same in eq 2.1.3.13 and eq 2.1.3.15 but extra functions of
are the same in eq 2.1.3.13 and eq 2.1.3.15 but extra functions of  and
and  are seen in these equations, respectively. Eq 2.1.3.13 and eq 2.1.3.15 are equal (because they both equal ), but the only way that this can be true is if
are seen in these equations, respectively. Eq 2.1.3.13 and eq 2.1.3.15 are equal (because they both equal ), but the only way that this can be true is if  . And the only way that can be equal to is if they are constants. Such constants can be ignored since functions f and g are arbitrary and they could be modified to “absorb” such constants.
. And the only way that can be equal to is if they are constants. Such constants can be ignored since functions f and g are arbitrary and they could be modified to “absorb” such constants.
Likewise, the constants  and
and  can be absorbed into the arbitrary functions F and G. Thus, the final result is:
can be absorbed into the arbitrary functions F and G. Thus, the final result is:
![\[ u(x,t) = q(x + ct) + p(x - ct) \quad \text{eq 2.1.3.17}\]](https://www.samartigliere.com/wp-content/ql-cache/quicklatex.com-1610e453fe843f520afd71f135422177_l3.png "Rendered by QuickLaTeX.com")
And this equation, eq 2.3.17 is the same as eq 2.1.3.8, which is what we were trying to prove.
II.2 d’Alembert’s Formula
A famous formula that gives a large group of solutions to wave equation is d’Alembert’s formula. I won’t go into great detail here but I will give a quick proof.
d’Alembert’s formula is derived from an initial value problem. We have the following conditions:

where
 is the initial position
is the initial position
 is the initial velocity
is the initial velocity
The basic idea is that, if we know the initial position and velocity of a mechanical system, we can predict its state at all future time. Thus, we should be able to determine the state of a wave at all times using this formula.
Recall that the general solution to the wave equation is:
![\[u(x,t) = p(x-ct) + q(x + ct)\]](https://www.samartigliere.com/wp-content/ql-cache/quicklatex.com-9e746865769f03399bf562462d88731e_l3.png "Rendered by QuickLaTeX.com")
We’ll find  and
and  by using the initial condition information. We start with:
by using the initial condition information. We start with:

So

Next we want to get rid of the derivatives in and . To do this we integrate eq 2.2.4. When we do the integral, we choose our anitderivative such that  . We have:
. We have:
![\[G(x) = -cp(x) + cq(x) \quad \text{eq 2.2.5} \]](https://www.samartigliere.com/wp-content/ql-cache/quicklatex.com-2fdb4c46f700d8d2b5c26cb5d4dd6f56_l3.png "Rendered by QuickLaTeX.com")
Now we solve for and in terms of and  :
:

After some algebra:

We have an expression for the general solution for the wave equation. We substitute in eq 2.2.6 and 2.2.7. We get:
![\begin{align*} u(x,t) &= \frac12 f(x-ct) - \frac{1}{2c} G(x-ct) + \frac12 f(x+ct) + \frac{1}{2c} G(x+ct) \\ &= \frac12 \left[ f(x+ct) + \frac12 f(x-ct) \right] + \frac{1}{2c} \left[ G(x+ct) - G(x-ct)\right]\\ & \text{eq 2.2.8} \end{align*}](https://www.samartigliere.com/wp-content/ql-cache/quicklatex.com-de25721136693f5b133224a3586a0bcd_l3.png "Rendered by QuickLaTeX.com")
But  can be expressed as an integral:
can be expressed as an integral:
![\[ G(x+ct) - G(x-ct) = \int^{x+ct}_{x-ct} = g(s)\,ds \quad \text{eq 2.2.9}\]](https://www.samartigliere.com/wp-content/ql-cache/quicklatex.com-0570dd398b56a890e7178c06143fecaf_l3.png "Rendered by QuickLaTeX.com")
Plugging eq 2.2.9 into eq 2.2.8 yields:
![\begin{align*} u(x,t) &= \frac12 \left[ f(x+ct) + \frac12 f(x-ct) \right] + \frac{1}{2c} \int^{x+ct}_{x-ct} g(s)\,ds \\ & \text{eq 2.2.10} \end{align*}](https://www.samartigliere.com/wp-content/ql-cache/quicklatex.com-11f09fbc647b02c211d1c59912826fbf_l3.png "Rendered by QuickLaTeX.com")
Eq 2.2.10 is d’Alembert’s formula.
II.3 Wave Equation Solution: Separation of Variables
We start with the wave equation:
![\[ u_{tt}=c^2U_{xx} \quad \text{eq 2.3.1} \]](https://www.samartigliere.com/wp-content/ql-cache/quicklatex.com-559a8900146abdfd98616587575e164a_l3.png "Rendered by QuickLaTeX.com")
We assume that the x-terms and t-terms are independent so that the wave equation can be written as:
![\[ u(x,t) = v(x)w(t) \quad \text{eq 2.3.2} \]](https://www.samartigliere.com/wp-content/ql-cache/quicklatex.com-3c2841695ad93fa172a38156642947f4_l3.png "Rendered by QuickLaTeX.com")
Because the x-terms and t-terms are independent, we can pull x-terms out from t-terms like constants and t-terms out from x-terms like constants. We get:
![\[ u_{tt} = v(x)w^{\prime \prime} (t) \quad u_{xx}=v^{\prime \prime }(x)w(t) \quad \text{eq 2.3.3} \]](https://www.samartigliere.com/wp-content/ql-cache/quicklatex.com-a5f14ea65a306d1cf4b9e5b44c1420a0_l3.png "Rendered by QuickLaTeX.com")
Next, we “separate the variables” i.e., get all the x-terms on one side and all the t-terms on the other side:
![\[ \frac{w^{\prime \prime} (t)}{w(t)} = c^2 \frac{v^{\prime \prime} (t)}{v(t)} \quad \text{eq 2.3.4} \]](https://www.samartigliere.com/wp-content/ql-cache/quicklatex.com-20070f8db4cce84c681ad883b83866b0_l3.png "Rendered by QuickLaTeX.com")
Now comes the important observation. I’ll quote Fleisch, Dan for this because he states the concept more clearly that I ever could:
The left side depends only on time (t) and does not vary with location (x). The right side depends only on location and does not vary with time. But if this equation is true at every location at every time, then neither side can vary at all (if it did, then, as time passes at a fixed location, the left side would vary but the right side would not [and the sides wouldn’t be equal anymore]). Thus both sides must be constant, and since the sides equal one another, they must equal the same constant.
Fleisch, Dan. “The Wave Equation.” A Student’s Guide to Waves, Cambridge University Press, 2015, p. 71.
Therefore, we can rewrite eq 2.3.4 as follows:
![\[ \frac{w^{\prime \prime} (t)}{w(t)} = \lambda = c^2\frac{v^{\prime \prime} (t)}{v(t)} \quad \text{eq 2.3.5} \]](https://www.samartigliere.com/wp-content/ql-cache/quicklatex.com-0291f2be32fcfe896a244fffb2602060_l3.png "Rendered by QuickLaTeX.com")
where  is a constant (referred to as the separation constant).
is a constant (referred to as the separation constant).
Now we need to solve 2 equations:
![\[ w^{\prime \prime} (t)=\lambda w(t) \quad \text{eq 2.3.6} \]](https://www.samartigliere.com/wp-content/ql-cache/quicklatex.com-f6768676e7ce141560aa61bfaf7783d5_l3.png "Rendered by QuickLaTeX.com")
and
![\[ v^{\prime \prime} (t)=\frac{\lambda}{c^2}v(x) \quad \text{eq 2.3.6} \]](https://www.samartigliere.com/wp-content/ql-cache/quicklatex.com-2aa0ca1a785813edf0d8b1b8a051a35f_l3.png "Rendered by QuickLaTeX.com")
To get an idea what potential solutions might look like, we’ll consider 3 cases, depending on the values of the constant terms or \displaystyle \frac{\lambda}{c^2}:
- The constant terms equal 0
- The constant terms are > 0
- The constant terms are < 0
Constants = 0:
![\[ w^{\prime \prime} (t)=0\]](https://www.samartigliere.com/wp-content/ql-cache/quicklatex.com-6a48b5e2b956a2dced7e14f954e9fb27_l3.png "Rendered by QuickLaTeX.com")
![\[ w(t) = A +Bt \]](https://www.samartigliere.com/wp-content/ql-cache/quicklatex.com-14b7d8778fc3cacb6c678dac0bc74776_l3.png "Rendered by QuickLaTeX.com")
![\[ v^{\prime \prime} (x)=0\]](https://www.samartigliere.com/wp-content/ql-cache/quicklatex.com-c7f620259d3280b4943052acfff64317_l3.png "Rendered by QuickLaTeX.com")
![\[ v(x) = C +Dx \]](https://www.samartigliere.com/wp-content/ql-cache/quicklatex.com-f34f26b4255b290b66bc5c0d15e6bb14_l3.png "Rendered by QuickLaTeX.com")
To get solutions to the equation, we recombine  and
and  as:
as:
![\[ u(x,t) = w(t)v(x) \]](https://www.samartigliere.com/wp-content/ql-cache/quicklatex.com-373609f63d514483c9de55ff63fa2a82_l3.png "Rendered by QuickLaTeX.com")
Because any linear combination of solutions of this equation is also a solution, and we can make any constant by taking a linear combination with 1, possible solutions that we can combine include:  , and . So ultimately, is any linear combination of , , , and
, and . So ultimately, is any linear combination of , , , and  . Thus,
. Thus,  is a general solution under this condition.
is a general solution under this condition.
Constants > 0:
To assure that is positive, we can set it equal to a constant squared. So let  . Our equations become:
. Our equations become:
![\[ w^{\prime \prime} (t) = \omega^2 w(t) \]](https://www.samartigliere.com/wp-content/ql-cache/quicklatex.com-44a3b89bfead49a386df031be84cd3eb_l3.png "Rendered by QuickLaTeX.com")
![\[ w(t) = e^{\omega t}, e^{-\omega t}\]](https://www.samartigliere.com/wp-content/ql-cache/quicklatex.com-922d8a2251b3620de0854a6ccca90229_l3.png "Rendered by QuickLaTeX.com")
![\[ v^{\prime \prime} (x) = (\frac{\omega}{c})^2 w(x) \]](https://www.samartigliere.com/wp-content/ql-cache/quicklatex.com-2b4a644715b03627107290df02d0d9df_l3.png "Rendered by QuickLaTeX.com")
![\[ v(x) = \displaystyle e^{\frac{\omega }{c}x}, e^{-\frac{\omega }{c}x} \]](https://www.samartigliere.com/wp-content/ql-cache/quicklatex.com-067390bd148747feb66c1c151802a572_l3.png "Rendered by QuickLaTeX.com")
To see how we arrived at these results, click :

 . That means that:
. That means that:






![\begin{align*} r^2 e^{rx} - \left(\frac{\omega}{c}\right)^2e^{rx}&=0\\ e^{rx}\left[ r^2 - \left(\frac{\omega}{c}\right)^2 \right]&=0\\ \left( r+\frac{\omega}{c} \right)\left( r-\frac{\omega}{c} \right)&=0\\ r=-\frac{\omega}{c} \quad r=\frac{\omega}{c} & \end{align*}](https://www.samartigliere.com/wp-content/ql-cache/quicklatex.com-4d0a7cf1390d7d4ea573a04c9f0ce987_l3.png "Rendered by QuickLaTeX.com")

 instead of
instead of 
When we recombine these solutions to get solutions to , we end up with the following base solutions:




As before, any linear combination of these base solutions is also a solution. And, of course, functions of the form  can also be expressed as sines and cosines.
can also be expressed as sines and cosines.
Constants < 0
To assure that is negative, we can set it equal to minus a constant squared. So let  . Our equations become:
. Our equations become:
![\[ w^{\prime \prime} (t) = -\omega^2 w(t) \]](https://www.samartigliere.com/wp-content/ql-cache/quicklatex.com-618b6f4ab09a60eb54ad4ed9aa3fb4f7_l3.png "Rendered by QuickLaTeX.com")
![\[ w(t) = e^{i \omega t}, e^{-i \omega t}\]](https://www.samartigliere.com/wp-content/ql-cache/quicklatex.com-260c47c9450b95114d661f07a859b2a4_l3.png "Rendered by QuickLaTeX.com")
![\[ v^{\prime \prime} (x) = (-\frac{\omega}{c})^2 w(x) \]](https://www.samartigliere.com/wp-content/ql-cache/quicklatex.com-5f987d16a26bfde90c084a9fbd6df545_l3.png "Rendered by QuickLaTeX.com")
![\[ v(x) = \displaystyle e^{i \frac{\omega }{c}x}, e^{-i\frac{\omega }{c}x} \]](https://www.samartigliere.com/wp-content/ql-cache/quicklatex.com-6453fd3c3752b42becb7be6584495d34_l3.png "Rendered by QuickLaTeX.com")
For a quick derivation of these results, click :
 here, recognizing that to solve
here, recognizing that to solve  , we just substitute
, we just substitute  for
for  in the solutions.
in the solutions. .
.
 or
or 




These exponential functions can also be expressed as sines and cosines via Euler’s formula:


Remember,  . Therefore, we get terms like:
. Therefore, we get terms like:

If we were to compute



we would get combinations of  ,
,  ,
,  and
and  , with various signs. Since, ultimately, our solutions will involve any linear combinations of these terms, we can dispense with the
, with various signs. Since, ultimately, our solutions will involve any linear combinations of these terms, we can dispense with the  (because the constant we multiply by can include
(because the constant we multiply by can include  or
or  ). To see this, click .
). To see this, click .
 and
and  is a solution to our equation. Therefore:
is a solution to our equation. Therefore:

 ,
,  ,
,  and
and  . Then:
. Then:
 equal zero, then
equal zero, then  equal zero, then
equal zero, then  and
and  with
with  and
and  , respectively.
, respectively.Thus the base functions we can make linear combinations of to get solutions for are:



Since

and

we can express the above base solutions as:

and

These equations are more commonly written as:

and

since


